Tema 7: Sistemas de EDOs
Introducción
Los sistemas de ecuaciones diferenciales ordinarias (EDOs) son una herramienta fundamental para modelar fenómenos donde múltiples variables interactúan entre sí. Estos sistemas describen cómo evolucionan en el tiempo varias funciones incógnitas cuyos comportamientos están interconectados.
Ejemplos:
- Ecología: Dinámica de poblaciones de especies que compiten o cooperan.
- Química: Reacciones químicas con múltiples reactivos y productos acoplados.
- Física: Sistemas mecánicos con grados de libertad interdependientes.
Ejemplo
Lotka-Volterra.
Considera un sistema depredador-presa con dos poblaciones: presas
: tasa de crecimiento de las presas, : tasa de depredación, : tasa de muerte de los depredadores, : tasa de crecimiento de los depredadores por consumo de presas.
El sistema resultante es:
Ejemplo
Considera la interconversión reversible entre dos especies químicas
El sistema resultante es:
En este tema, nos centraremos en sistemas lineales homogéneos de orden dos con coeficientes constantes, es decir, sistemas de la forma:
donde
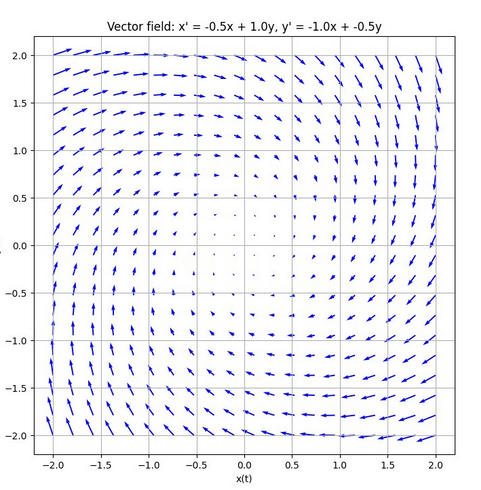
Interpretación geométrica
Gráficamente, los sistemas de EDOs pueden interpretarse como un campo de flechas en el espacio
Sistemas homogéneos: forma general
Un sistema de EDOs lineales homogéneo de orden 2 con coeficientes constantes se puede escribir en la forma:
donde:
es el vector de funciones incógnita. es una matriz constante.
La solución depende de los autovalores (
Caso 1: matriz diagonalizable (autovalores reales y distintos)
- Autovalores:
(reales). - Autovectores:
y asociados a y . - Solución General:
Ejemplo:
Si, con , , y autovectores , , entonces: Ejemplo:
Si, con , , y autovectores , , entonces: Ejemplo:
Si, con , , y autovectores , , entonces:
Diferentes casos:
- dos autovalores positivos: es una fuente
- dos autovalores negativos: es un sumidero
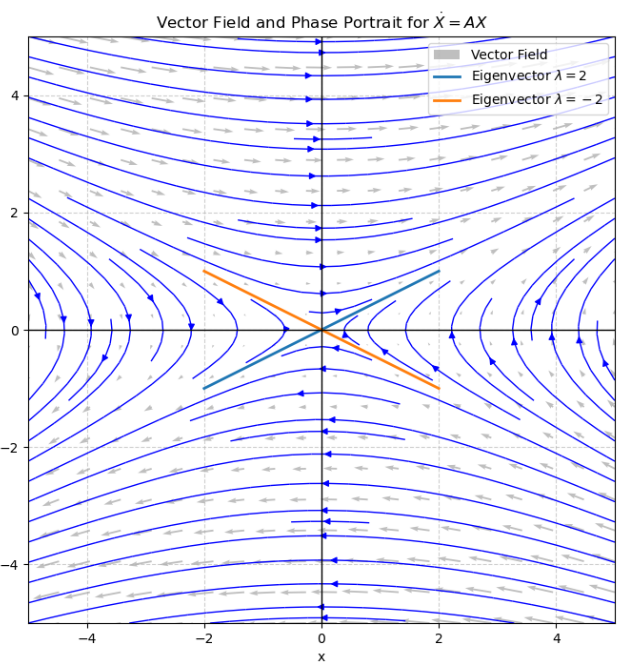
- uno positivo y otro negativo: es un punto de silla
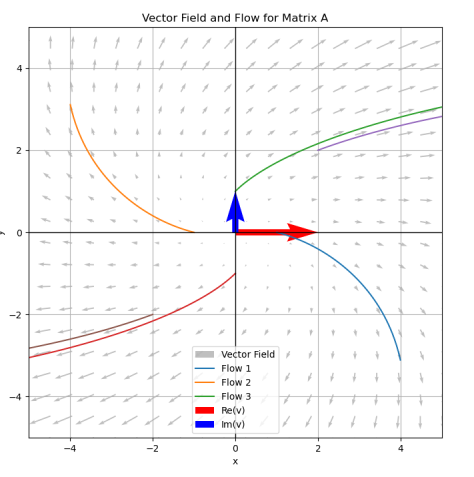
Caso 2: autovalores complejos
- Autovalores:
. - Autovector:
, donde y son vectores reales. - Solución General:
Ejemplo:
Si, con y autovector , entonces , . La solución es: Ejemplo:
Si, con y autovector , entonces , . La solución es:
Caso 3: autovalores reales repetidos (deficiente)
- Autovalor:
(doble) con un solo autovector linealmente independiente . - Autovector Generalizado: Resolver
para encontrar . - Solución General:
Ejemplo:
Si, con (doble) y autovector , se busca tal que . La solución es:
Resumen
| Caso | Condición | Método de Solución |
|---|---|---|
| Diagonalizable | Autovalores y autovectores. | |
| Autovalor deficiente | Autovector generalizado. | |
| Autovalores complejos | Partes real e imaginaria del autovector. |
Caso no homogéneo: variación de constantes
Si tenemos un sistema lineal no homogéneo con coeficientes constantes:
donde
donde:
es la solución general del sistema homogéneo , es una solución particular del sistema completo.
Definimos la matriz fundamental
Usaremos el método de variación de constantes:
Teorema. Sea
entonces una solución particular del sistema no homogéneo
está dada por
Ejemplo
Sea el sistema:
1. Sistema homogéneo:
Matriz
Autovalores:
La matriz es triangular superior, así que los autovalores son directamente los elementos de la diagonal:
Vectores propios:
- Para
:
- Para
:
Solución general del sistema homogéneo:
2. Solución particular (Variación de constantes)
La matriz fundamental construida con las soluciones del sistema homogéneo es:
Inversa de
Multiplicamos
Integramos componente a componente:
- Para la primera componente:
- Para la segunda:
Multiplicamos por
Solución particular:
Solución general del sistema: